
義手
Upper Limb Prosthetics and Orthotics
切断者の社会復帰と作業支援を目標とする人工肢のメカニズムや制御方法の開発研究,義手の使用評価技術の研究を進めています.

- 研究例
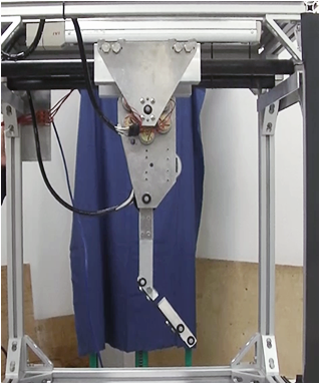
- マルチモーダル・センサ制御式前腕義手
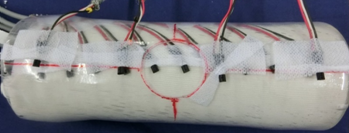
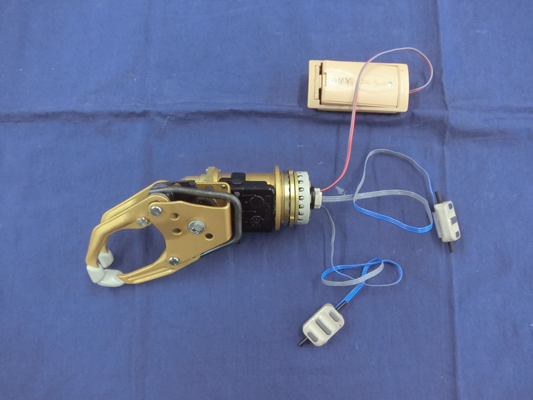
- 義手ハンド用筋電+ケーブル混成インターフェース
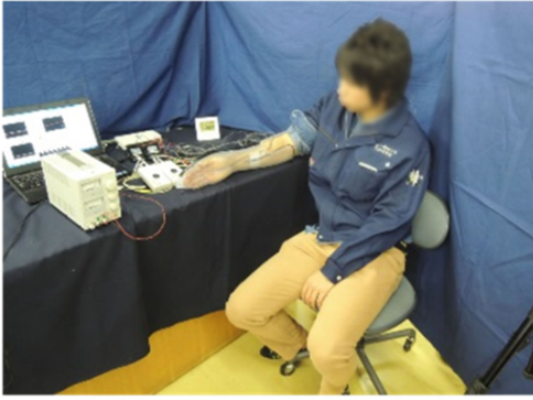
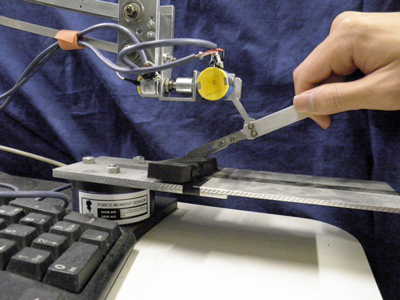
- 能動義手部品の評価試験法
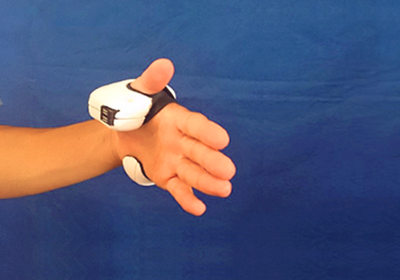
- アクティビティ用義手手先具
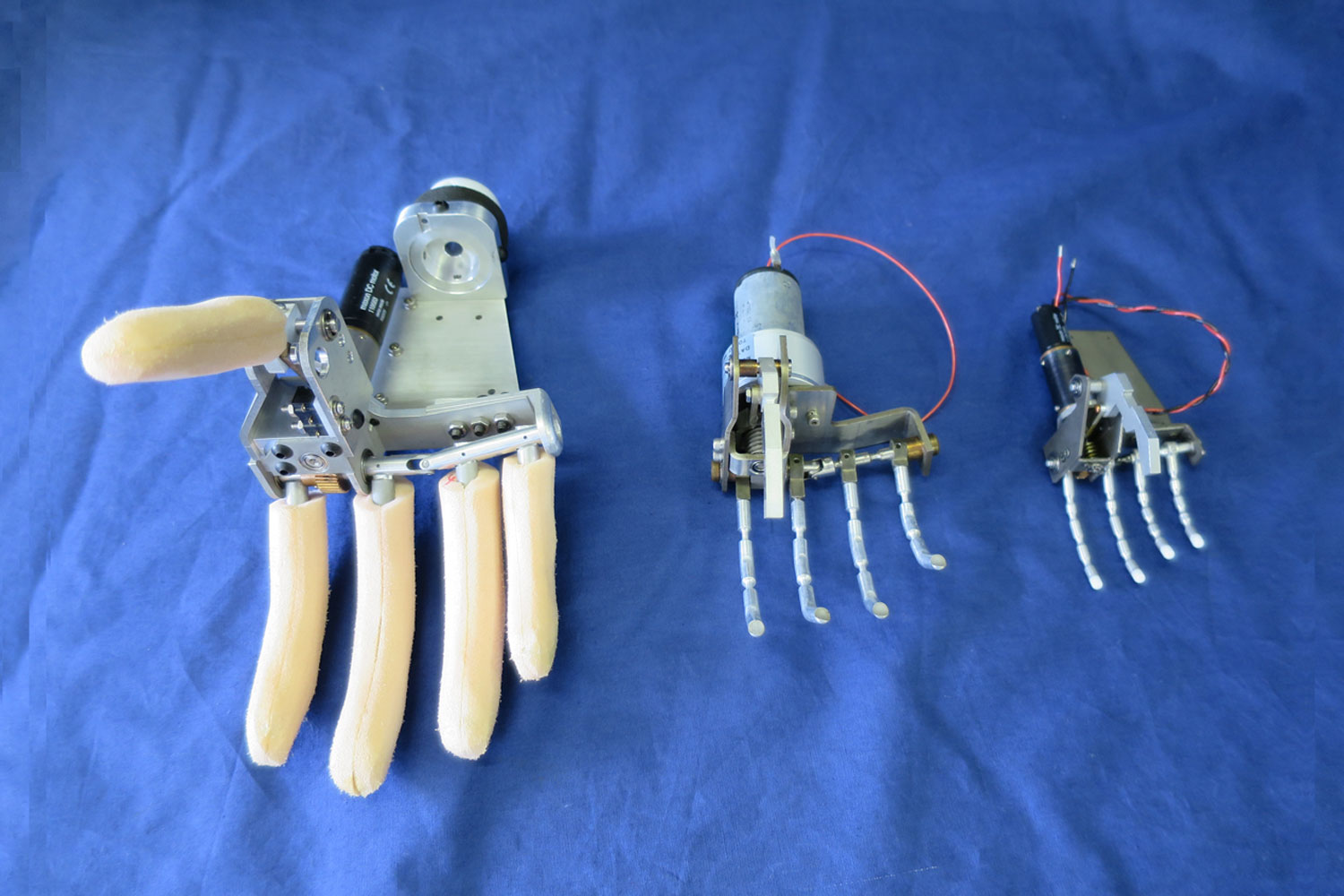
- 幼児用電動義手
- 遊びを支援する義手ソケット設計
- 義手使用の代償動作の3次元動作解析
- 幼児用筋電操作トレーナー