Research
scroll
Theme ー 研究テーマ ー
器械出し看護師ロボット
Scrub Nurse Robot:SNR
SUMMARY
研究概要
研究背景
手術室における慢性的かつ深刻な看護師不足
手術室看護師の器械出し業務*をロボットによって補う
器械出し業務:滅菌された手術器具やガーゼを外科医に提供することによって手術進行を助ける業務
到達目標
"理想的"な器械出し看護師(Scrub Nurse)のパフォーマンス
- 執刀医が次に使用する手術器具を正確に予測し準備する
- 的確なタイミング*で器具を提供する *的確なタイミング:執刀医を待たせることなく、素早く提供する
- 執刀医ができるだけ手術に集中できるような支援
主な成果
- 外科手術のモデル化
- SNR用視覚認識システムの開発
- 手術器具自動挿入機能の開発
動画の説明
VIDEO DESCRIPTION
外科手術のモデル化の一例
外科手術全体を数学的・論理的にモデル化する試みを行っている:
- 動画で示している例は腹腔鏡下胆嚢摘出術のモデル化であり、Uppaal形式のExtended timed automaを用いて記述している
- 以下の種々のモデルがお互いにリンクして手術が進行していく
モデル化する対象
-
- 外科手術手順:
- 手術全体の流れであり、一連の外科操作から構成される。作業工程の フローチャート的表現に似ている。
-
- 執刀医の行為: さまざまな視点からモデル化が可能
- 外科操作に視点を置いたモデル:執刀医が術中にどのような外科操作を行うかに視点を 置いたモデル
- 使用する手術器具に視点を置いたモデル: 外科操作ではなく、使用する手術器具に視点を置いているので、SNRにとっては準備す べき器具の観点からのモデル化であるので有用と考えられる
- 執刀医の動作に視点を置いたモデル: 執刀医が実際の外科操作を行っている際の動作には操作に特異的な動きはないが、器具 交換時に観察される動作は特徴的である。また、この器具交換時は SNRの最重要任務で ある手術器具提供を行わなければならないので、SNRにとって重要なモデルとなる
-
- 器械出し看護師の行為:
- SNRが自ら行うべき行為に関するモデル
-
- 患者の状態:
- 正常状態、過渡的状態、異常状態に大別したモデル
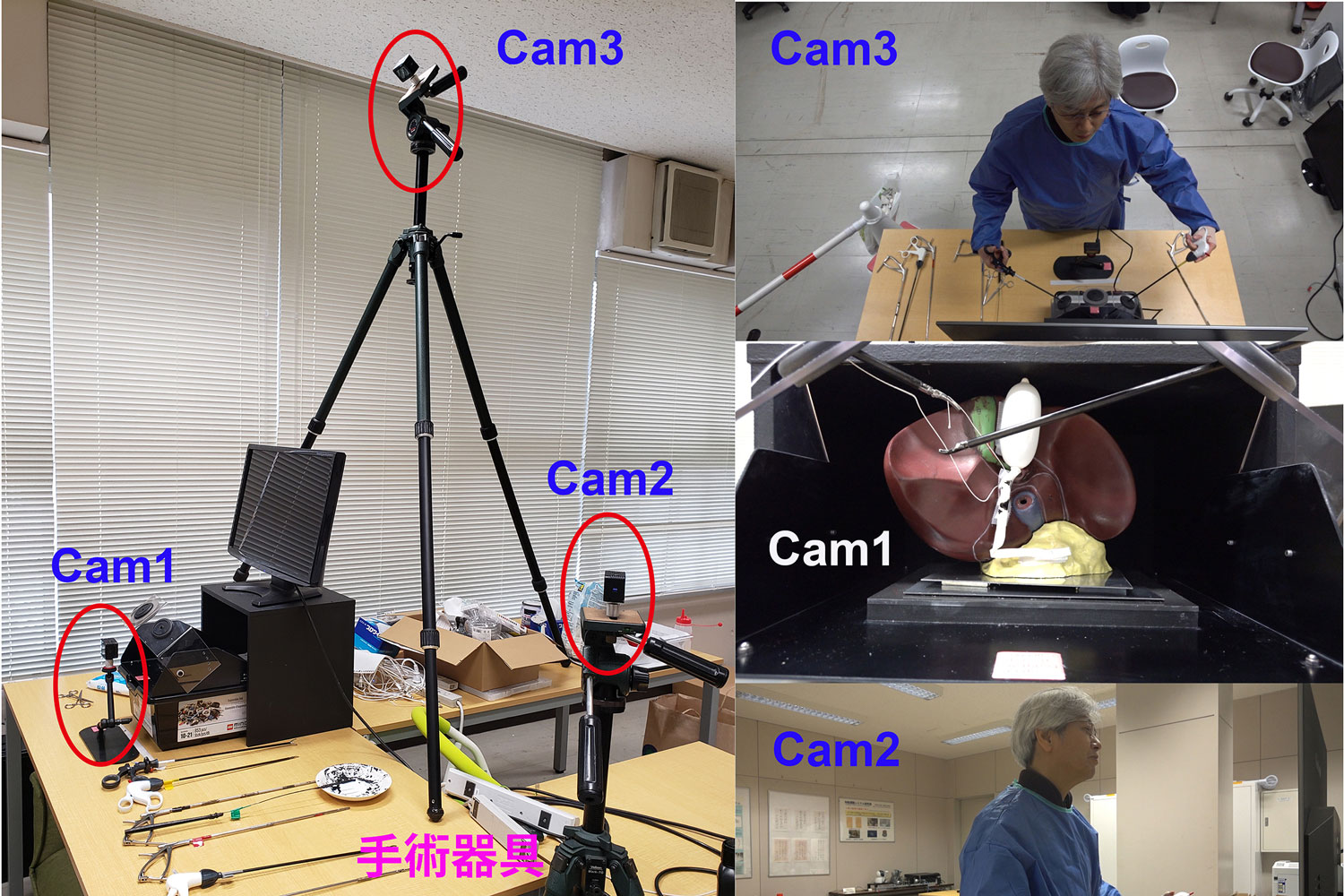
リアルタイム視覚認識システム(RTVRS)によるSNR2号機の駆動・制御
SNRに執刀医の術中動作を視覚的に認識させるためのシステム
- 執刀医の身体に貼付したマーカの位置情報からリアルタイムに動作を解析し、認識させる
- 動画はヒト型ロボットであるSNR2号機をRTVRSで駆動・制御している実験風景
- この実験では、手術器具の抜去と挿入の瞬間を捉えてSNRが反応するように設定
- 器具抜去の瞬間を捉えるとSNRは手にしている器具を差し出す
SNR3号機の動画
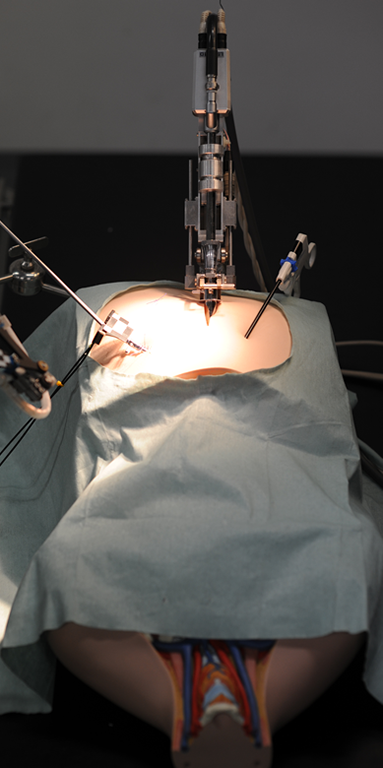
手術器具自動挿入機能
- 最新版であるSNR3号機の最大の特長
- 狭いトロカール・カニューレ*入口に器具を持っていって挿入するという執刀医の負担をなくすために考案
・トロカール・カニューレ:腹壁や胸壁を貫いて留置する細い中空管のことで、内視鏡下外科手術ではこの管を通して手術器具を挿入して手術を行う
- 執刀医が手術野から目を離すことなく手術に集中できる利点
- 手術器具交換に要する時間の大幅な短縮
Theme ー 研究テーマ ー